

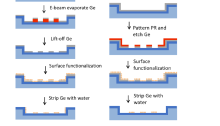
Congratulations to Dr. Diaz-Botia: silicon carbide for neurotech paper is out!
Congratulations to Camilo Diaz-Botia for the publication of his SiC work in collaboration with Prof. Maboudian group (https://maboudianlab.berkeley.edu/) AND his doctorate degree! Dr. Diaz-Botia is now off to do great things at [redacted]. 😉 Diaz-Botia, Camilo, Lunet Luna, Ryan Neely, Maysam Chamanzar, Carlo Carraro, Jose Carmena, Philip Sabes, Roya Maboudian, and Michel Maharbiz. “A silicon…
Jose Carmena and Michel Maharbiz have received a prestigious 2017 McKnight Technological Innovations in Neuroscience Award
Prof. Maharbiz named Chan-Zuckerberg Biohub Investigator
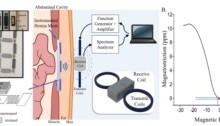
Neural Dust paper is out in Neuron
Congratulations to the Neural Dust team: Dongjin Seo, Ryan M. Neely, Konlin Shen, Utkarsh Singhal, Elad Alon, Jan M. Rabaey, Jose M. Carmena, “Wireless Recording in the Peripheral Nervous System with Ultrasonic Neural Dust,” Neuron, Volume 91 , Issue 3 , 529 – 539. http://www.cell.com/neuron/fulltext/S0896-6273(16)30344-0
Tom Zajdel wins Outstanding Poster Award from the Biophysical Journal
Congratulations, Tom! Winner of the Biophysical Journal Outstanding Poster Award at the Engineering Approaches to Biomolecular Motors: From in vitro to in vivo for his work, “Impedance-based Electrochemical Readout of Bacterial Flagellar Rotation,” Tom J. Zajdel, Alexander N. Walczak, Debleena Sengupta, Victor Tieu, Caroline M. AjoFranklin, Michel M. Maharbiz. .
Come see us at EMBC 2015 in Milan!
37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS) MiCo – Milano Conference Center; Milan, Italy August 25 – 29, 2015 “Impedance Spectroscopy to Monitor Fracture Healing,” by Monica Lin*, Safa Herfat, Chelsea Bahney, Meir Marmor, Michel Maharbiz “Impedance Sensing Device for Monitoring Ulcer Healing in Human Patients,” by Amy…
Congratulations to Dr. Maysam Chamanzar on accepting a position in the ECS Dept at Carnegie Mellon University!
Congratulations to Maysam! Woot woot!
Congratulations to Konlin Shen and Stefanie Garcia for being awarded a 2015 NSF Graduate Research Fellowship!!!

Nat Comm paper on Impedance Sensing for Wound Monitoring is out!
Impedance sensing device enables early detection of pressure ulcers in vivo Check it out! http://www.nature.com/ncomms/2015/150317/ncomms7575/full/ncomms7575.html

Beetles on the cover of Current Biology!
Prof. Sato’s continuing work with our lab on instrumentation for flying insects was the cover of the current issue of Current Biology! http://www.cell.com/current-biology/abstract/S0960-9822(15)00083-4
